
Filling Non-tidal Quantities Based on a Neighbor¶
1. Introduction¶
Example Data and Typical Preprocessing¶
When a physically similar or proximate station is available, it can be advantageous to use that neighbor to impute missing values in the target series. Our canonical example is San Joaquin River flow at Vernalis (VNS), filled from the subtidal component of Mossdale Bridge (MSD):
MSD is tidal → we prefilter with a subtidal filter (e.g.,
cosine_lanczos(..., '40h')).MSD lags VNS by ~4 hours → we estimate a fixed lag using the
calculate_lagfunction and shift the neighbor before modeling.MSD sometimes has its own gaps → we linearly interpolate neighbor briefly before filtering to avoid edge artifacts.
VNS − MSD reflects seasonal channel depletions and episodic Paradise Cut/Weir overflow.
This notebook shows: (a) how to prepare data, (b) gap-filling methods, (c) how to compare methods on synthetic gaps, and (d) how to store/reuse Dynamic-Factor (DFM) fits.
Bottom Line on Methods (Quick Take)¶
Residual interpolation (linear or PCHIP) is the most accurate and simple option when the neighbor is present. It is fairly easy to explain and it consistently reconstructs Vernalis from Mossdale well. However, it cannot fill when the neighbor is missing. Whether one can live with this limitation depends on the pair of data streams under consideration. In the Vernalis/Mossdale example this would leave about 10% of the data missing.
DFM (Trimbur) is heavier-weight (requires fitting) but, with reasonable joint coverage, produces complete, robust fills (handles runs of missing values better than residual methods).
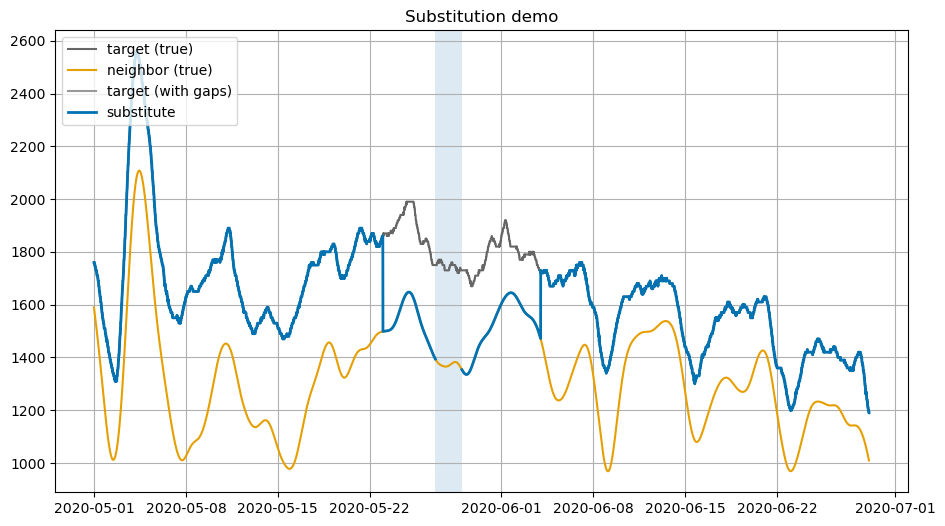
Substitution and global regression are useful null baseline models but result in estimates that have high error and have no time connection to the main series. This will cause a lurching between the target series and the substitute at the edges of gaps.
For VNS/MSD, residual-interp and DFM are the practical choices; pick Residual-interp for speed/simplicity or when you have complete data at the neighbor, DFM for completeness/robustness.
2. Setup¶
The code assumes your standard environment with vtools, dms_datastore, and by extension statsmodels. The first steps have to do with imports, acquisition etc.
[ ]:
%load_ext autoreload
%autoreload 2
# Imports (plotting: matplotlib only; no seaborn)
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from vtools.functions.neighbor_fill import fill_from_neighbor
from vtools import cosine_lanczos, calculate_lag, minutes
from vtools.data.gap import GapSpec, GapStrategy, apply_gaps
# Matplotlib defaults
plt.rcParams['figure.figsize'] = (11, 6)
plt.rcParams['axes.grid'] = True
3. Data: fetching & preprocessing¶
Below is a template provide_example_data() that illustrates a common setup for VNS/MSD:
Load both series on a common range.
Pre-filter MSD to subtidal (
cosine_lanczos, e.g., 40h window).Estimate the lag between the (filtered) neighbor and target (e.g., up to 14h), convert to steps, and shift the neighbor.
Return
(target, neighbor, regime)whereregimecan beNoneor a categorical series (barrier in/out, season, etc.).
[ ]:
# These series are provided in the examples. You could replace this
# with a project-specific provider using dms_datastore.
# The function must return (target: Series, neighbor: Series|DataFrame, regime: Series|None),
# aligned (or alignable) by time.
def provide_example_data(start='2017-02-01', end='2022-12-01'):
sjr = pd.read_csv("data/sjr_flow.csv", index_col=0, parse_dates=True).asfreq('15min')
msd = pd.read_csv("data/msd_flow.csv", index_col=0, parse_dates=True).asfreq('15min')
sjr = sjr.squeeze().interpolate(limit=4)
msd = msd.squeeze().interpolate(limit=4)
# Subtidal (non-tidal) component for MSD
msd = cosine_lanczos(msd, '40h').squeeze()
# Estimate and apply lag (non-calendar resolution recommended, e.g., '15min')
lag_steps = int(calculate_lag(msd, sjr, max_lag='14h', res='15min')/minutes(15))
msd = msd.shift(lag_steps)
# Optional: regime (barrier, season, etc.) — using a placeholder here
regime = None
# Focus window
return sjr.loc[pd.Timestamp(start):pd.Timestamp(end)], msd.loc[pd.Timestamp(start):pd.Timestamp(end)], regime
# Prepare example data
y, x, regime = provide_example_data()
# --- Stable, colorblind-safe colors and a label->color lookup ----------------
# Okabe–Ito palette (colorblind friendly)
OKABE_ITO = [
"#E69F00", # 0 orange (reserved for neighbor)
"#56B4E9", # 1 sky blue
"#009E73", # 2 bluish green
"#0072B2", # 4 blue
"#D55E00", # 5 vermillion
"#CC79A7", # 6 reddish purple
"#999999", # 7 grey
"#F0E442", # 3 yellow
]
# Fixed order for algorithms in the notebook and plots
ALGO_ORDER = [
"ols",
"huber",
"rolling",
"lagged_reg",
"loess",
"dfm_trimbur_rw",
"dfm_trimbur_ar",
"resid_interp_linear",
"resid_interp_pchip",
"substitute",
]
# Build a stable color map for algorithms: skip palette[0] (reserved for neighbor)
_NEIGHBOR_COLOR = OKABE_ITO[0]
_ALGO_COLORS = {algo: OKABE_ITO[(i % (len(OKABE_ITO) - 1)) + 1] # 1..end
for i, algo in enumerate(ALGO_ORDER)}
def _normalize_label(s: str) -> str:
# normalize method labels like "dfm trimbur rw" / "dfm_trimbur_rw"
return s.strip().lower().replace(" ", "_")
def color_for(label: str) -> str:
"""
Return a consistent color for a plotted series, based on its label.
Rules:
- "target (gapped)" -> black
- "target (true)" -> gray
- "neighbor" -> first palette color (reserved)
- algorithms -> stable color from palette by name
- unknown labels -> deterministic fallback into palette (excluding neighbor color)
"""
lab = label.strip().lower()
# fixed roles
if lab == "target (gapped)":
return "#000000" # black
if lab == "target (true)":
return "#666666" # thin gray recommended
if lab == "neighbor":
return _NEIGHBOR_COLOR
# algorithms by name
key = _normalize_label(label)
if key in _ALGO_COLORS:
return _ALGO_COLORS[key]
# deterministic fallback for anything else (exclude index 0)
idx = (abs(hash(key)) % (len(OKABE_ITO) - 1)) + 1
return OKABE_ITO[idx]
4. Methods at a glance¶
We support a family of neighbor-based approaches (choose via method=):
``’substitute’`` — simple substitution: use neighbor only where target is missing.
``’ols’`` / ``’huber’`` — linear regression (ordinary / robust-Huber) on overlap.
``’loess2d’`` — nonparametric 2-D smoother in
(time, x); captures slow drift vs time.``’resid_interp_linear’`` / ``’resid_interp_pchip’`` — difference the \(\text{target}-\text{neighbor}\) series to form residuals. Interpolate the residuals with linear or higher order shape-preserving splines, then add the now-complete residuals back to the neighbor.
``’rolling_regression’`` — short-window OLS with time-varying coefficients [poor performer in speed and accuracy].
``’lagged_elasticnet’`` — regularized regression on lagged neighbor(s). [not recommended]
Dynamic Factor (DFM) variants:
``’dfm_trimbur_ar’`` / ``’dfm_trimbur_rw’`` — common-trend factor with Trimbur local linear trend; anomaly AR(1) or RW.
Residual-interp is the simplest and often the best choice (requires neighbor present); DFM is best for complete, robust fills (requires fitting).
The methods are described in the subsections below. All methods are accessed via the single API
fill_from_neighbor(target, neighbor, method=...).
4.1 Linear and robust regression¶
We fit a global least squares fit where both y and x are observed. For Ordinary Least Squares (OLS):
Robust (Huber) replaces least-squares with a Huber loss \(\rho_\delta(\cdot)\) to reduce outlier influence.
4.2 Two-dimensional LOESS-like regression (time & neighbor)¶
Model the slow drift with time while retaining dependence on the neighbor:
Implemented via distance-weighted KNN in standardized feature space \((t, x)\).
4.3 Residual-based filling (linear / PCHIP)¶
Fit the baseline on overlap: \(y_t \approx a + b x_t\).
Compute residuals: \(r_t = y_t - (a + b x_t)\).
Interpolate :math:`r_t` inside bounded gaps only (no extrapolation) using linear or PCHIP in time.
Recompose: \(\hat y_t = (a + b x_t) + \tilde r_t\).
This preserves local curvature better than interpolating the original series directly.
4.4 Dynamic Factor (DFM) with Trimbur local-trend and anomalies¶
In this method, the structural model describes how both the target and the neighbor share a slowly evolving common trend \(\mu_t\) that captures basin-scale behavior such as overall inflow, channel depletion, or other broad hydrologic controls. The companion term \(\beta_t\) acts as a local slope or rate of change, so together \((\mu_t,\beta_t)\) form a local linear trend that can drift gradually over time. Excellent texts on structural time series modeling include Harvey’s Forecasting, Structural Time Series Models and the Kalman Filter (1990) and Koopman & Durbin’s Time Series Analysis by State Space Methods (2012).
Dynamic common factor models tend to be hard to fit if you layer in a lot of additional anomalies or include too many factors without constraints, so the practical choice here is one common trend, which we apply verbatim (with observation noise) to the neighbor (MSD) since it is smoother. An AR(1) or random walk anomaly terms \(a^y_t\) and \(a^x_t\) represents short-term departures from that shared trend at Vernalis — mostly due to channel depletions but also encompassing time correlated measurement noise or operational perturbations. For the AR(1) case the autoregressive parameter \(\phi\) controls their persistence: - if \(|\phi|\) is small, deviations decay rapidly (almost white noise). Such a model is not sufficient to model the very persistent perturbations caused by seasonal channel depletions. - if \(|\phi|\) is near 1, they behave like random walks, allowing slow reversion. - the choice \(\phi=1\) is the random walk model
Let a common trend \(\mu_t\) follow a local linear trend (Trimbur variant fixes level shock to zero):
Optional anomaly components \(a^y_t, a^x_t\) capture idiosyncratic fluctuations in target/neighbor as AR(1) or RW:
Observations:
where \(\mathbf{1}_{\{a^y\}}\) and \(\mathbf{1}_{\{a^x\}}\) are indicator variables (0 or 1) that specify whether the anomaly term is included for the target (\(y\)) or neighbor (\(x\)) series, respectively.
Kalman smoothing provides \(\hat y_t\) and an analytic PI via \(\mathrm{Var}(y_t\mid\text{all}) = Z_t P_t Z_t' + H_t\). Note that while the “Kalman” name has a lot of name recognition, the Kalman smoother is just a statistical evaluation tool, not a complete description of the assumptions as above. Again Harvey (1990) is an excellent start and includes information on dynamic factor analysis which goes well beyond the simple one-component method described here.
5. Simple substitution¶
y with the available x. It’s cheap but not appreciably more so than other methods. Below we highlight two issues with simple substitution that are shared by a great number of other models that do not consider time series properties.[ ]:
y_gap0 = y.copy()
x_gap0 = x.copy()
y_gap0.loc[pd.Timestamp('2020-05-23'):pd.Timestamp('2020-06-04')] = np.nan
x_gap0.loc[pd.Timestamp('2020-05-27'):pd.Timestamp('2020-05-29')] = np.nan
# Run the null 'substitute' method
print("starting substitution")
res_sub = fill_from_neighbor(y_gap0, x_gap0, method='substitute')
print("ending substitution")
# Plot two short windows to show transitions
def plot_window(t0, t1, title):
fig, ax = plt.subplots()
ax.plot(y.loc[t0:t1].index, y.loc[t0:t1].values, label='target (true)',
color=color_for('target (true)'), linewidth=1.5)
ax.plot(x.loc[t0:t1].index, x.loc[t0:t1].values, label='neighbor (true)',
color=color_for('neighbor'), linewidth=1.5)
ax.plot(y_gap0.loc[t0:t1].index, y_gap0.loc[t0:t1].values, label='target (with gaps)',
color=color_for('target (with gaps)'), linewidth=1.5)
ax.plot(res_sub['yhat'].loc[t0:t1].index, res_sub['filled'].loc[t0:t1].values,
label='substitute', linewidth=2, color=color_for('substitute'))
# Shade times where neighbor is missing
nbr = x_gap0.loc[t0:t1]
miss = nbr.isna()
if miss.any():
starts = np.where(np.diff(miss.astype(int), prepend=0, append=0)==1)[0]
ends = np.where(np.diff(miss.astype(int), prepend=0, append=0)==-1)[0] - 1
for s, e in zip(starts, ends):
ax.axvspan(nbr.index[s], nbr.index[e], alpha=0.15)
ax.set_title(title)
ax.legend(loc='upper left')
plt.show()
# Example windows (adjust as needed)
plot_window(pd.Timestamp('2020-05-01'), pd.Timestamp('2020-06-29'), 'Substitution demo')
starting substitution
ending substitution
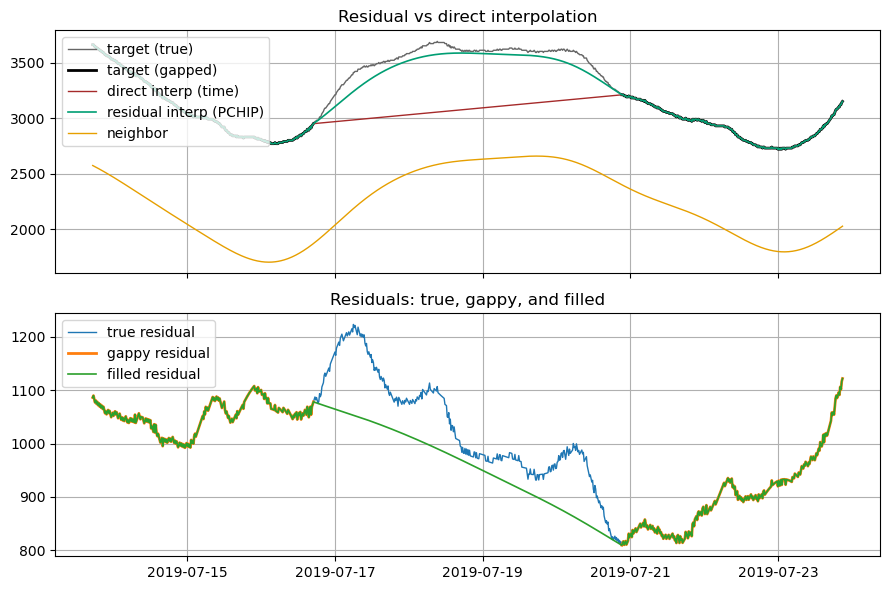
6. Residual-based vs direct interpolation (visual)¶
In the picture below, we compare interpolating the original y versus interpolating residuals and then recombining. The direct interpolation doesn’t have enough data to track curvature in the original series so it “cuts the corners”. Residual-based methods work on the smaller difference between the series, which though wiggly can still be linearly interpolated to much lower error. Note the much narrower y-axis range on the bottom plot below, which basically reduces the linear
interpolation to the neighborhood of 100-200cfs instead of 1000s. As shown in the top plot the method of interpolating on residuals and adding back to the original “neighbor” to get back to original values works better in non-linear segments. One other thing you can see in the residual plots, because it is more of a close up, is the fuzzy measurement noise at the Vernalis sensor. The DFM methods naturally smooth this over.
[ ]:
# Choose a curvy slice with a bounded gap
spec1 = GapSpec(n_gaps=1, min_len=400, max_len=400, seed=9, strategy=GapStrategy.TARGET_ONLY)
y1_gap, x1_gap, gaps2 = apply_gaps(y, x, spec1)
# (A) Direct time interpolation of y (inside-only)
y_direct = y1_gap.interpolate(method='time', limit_area='inside')
# (B) Residual-based interpolation via the API
res_resid = fill_from_neighbor(y1_gap, x1_gap, method='resid_interp_linear')
# Plot
t0 = list(gaps2['target'])[0][0] - pd.Timedelta('3D')
t1 = list(gaps2['target'])[0][1] + pd.Timedelta('3D')
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(9, 6), sharex=True)
# Top: main series and fills
ax1.plot(y.loc[t0:t1], label='target (true)', color=color_for('target (true)'), linewidth=1.0)
ax1.plot(y1_gap.loc[t0:t1], label='target (gapped)', color=color_for('target (gapped)'), linewidth=2.0)
ax1.plot(y_direct.loc[t0:t1], label='direct interp (time)', color="brown", linewidth=1.0)
ax1.plot(res_resid['yhat'].loc[t0:t1], label='residual interp (PCHIP)', color=color_for('resid_interp_pchip'), linewidth=1.2)
ax1.plot(x1_gap.loc[t0:t1], label='neighbor', color=color_for('neighbor'), linewidth=1.0)
ax1.set_title('Residual vs direct interpolation')
ax1.legend(loc='upper left')
# Bottom: residuals
true_resid = y - x
gappy_resid = y1_gap - x1_gap
filled_resid = res_resid['yhat'] - x1_gap
ax2.plot(true_resid.loc[t0:t1], label='true residual', linewidth=1.0)
ax2.plot(gappy_resid.loc[t0:t1], label='gappy residual', linewidth=2.0)
ax2.plot(filled_resid.loc[t0:t1], label='filled residual', linewidth=1.2)
ax2.set_title('Residuals: true, gappy, and filled')
ax2.legend(loc='upper left')
plt.tight_layout()
plt.show()
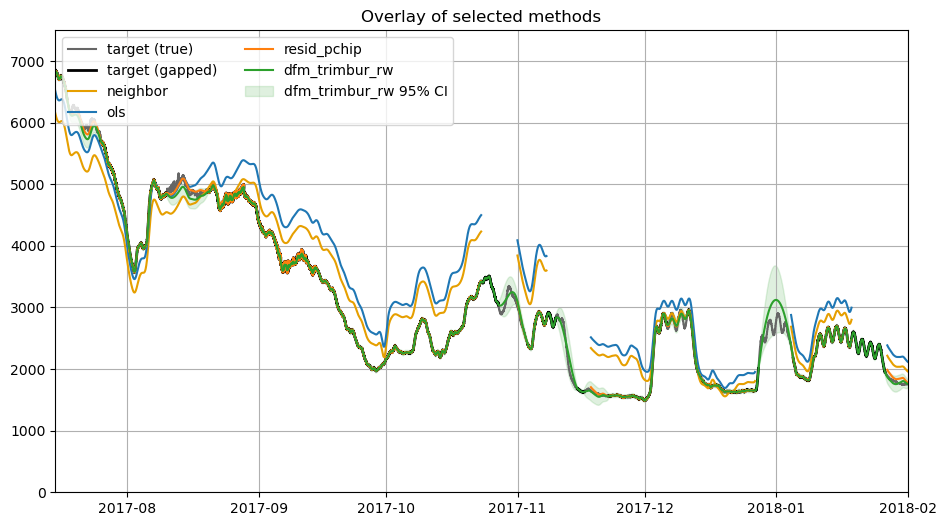
7. Method catalog — sample calls¶
Below are concise examples for several methods. All return a dict with keys: filled, yhat, optional pi_lower/pi_upper, model_info, and metrics. filled uses the original values where available, but imputes missing values as the algorithm is capable. yhat is estimates for the target time series which may include predictions at non-missing times. In the case of regression, the estimates may not be great and there may be a ‘lurching’ effect between original series and
fill values. In the case of dfm, the yhat estimate may low-pass a lot of jitter in the instrument and conceivably is preferable to the origin data. PI stands for prediction interval, a measure of confidence in the estimate that is available with dfm and characterizes the growth of uncertainty with gap size.
[ ]:
spec2 = GapSpec(n_gaps=100, min_len=400, max_len=1000, seed=9, strategy=GapStrategy.TARGET_ONLY)
y2_gap, x2_gap, gaps2 = apply_gaps(y, x, spec2)
# Common inputs
lags_0_4 = range(0, 5)
examples = {
"substitute": dict(method="substitute"),
"ols": dict(method="ols"),
"huber": dict(method="huber"),
"loess2d": dict(method="loess2d"),
"resid_linear": dict(method="resid_interp_linear"),
"resid_pchip": dict(method="resid_interp_pchip"),
"rolling_reg": dict(method="rolling_regression", window=72),
"lagged_enet": dict(method="lagged_elasticnet", lags=lags_0_4),
"dfm_trimbur_ar": dict(method="dfm_trimbur_ar"),
"dfm_trimbur_rw": dict(method="dfm_trimbur_rw"),
}
# Run a quick fit for selected methods
to_run = ["ols", "resid_pchip", "dfm_trimbur_rw"]
results = {name: fill_from_neighbor(y2_gap, x2_gap, **examples[name]) for name in to_run}
# Simple overlay plot
fig, ax = plt.subplots()
ax.plot(y, label='target (true)', color=color_for('target (true)'), linewidth=1.5)
ax.plot(y2_gap, label='target (gapped)', color=color_for('target (gapped)'), linewidth=2.0)
ax.plot(x2_gap, label='neighbor', color=color_for('neighbor'), linewidth=1.5)
#
for name, r in results.items():
# draw the method line and keep the handle to fetch its color
# draw the method line and keep the handle to fetch its color
line, = ax.plot(r['yhat'].index,r['yhat'].values, label=name, linewidth=1.5)
# add CI only for DFM-style methods, if available
if name.startswith('dfm') and r.get('pi_lower') is not None and r.get('pi_upper') is not None:
# ensure we have aligned Series for fill_between
yhat = pd.Series(r['yhat'])
pil = pd.Series(r['pi_lower']).reindex(yhat.index)
piu = pd.Series(r['pi_upper']).reindex(yhat.index)
color = line.get_color()
ax.fill_between(pil.index, pil.values, piu.values,
alpha=0.15, color=color, label=f"{name} 95% CI")
ax.set_xlim(pd.Timestamp(2017, 7, 15), pd.Timestamp(2018, 2, 1))
ax.set_ylim(0,7500.0)
ax.set_title('Overlay of selected methods')
ax.legend(ncol=2, loc='upper left')
plt.show()
Z(y): [1. 0. 1.] Z(x): [1.0403 0. 0. ]
diag(T): [1. 1. 1.]
diag(Q): [0.00e+00 0.00e+00 1.09e-06] diag(H): [1.e-05 1.e-05]
modes: factor=trimbur anom_mode=rw anom_var=target
active params: ['log_q_beta', 'log_q_ay', 'log_r_y', 'log_r_x', 'load']
8. Comparisons on synthetic gaps¶
We evaluate each method on known artificial gaps. Following the analysis harness, we tabulate coverage and RMSE segmented by neighbor availability:
RMSE_all — over all overlapping timestamps.
RMSE_all_with_neighbor — where the neighbor is non-NaN.
RMSE_in_gaps — only where the target was synthetically gapped.
RMSE_gaps_with_neighbor — gap points and neighbor present.
These are often the most decision-relevant numbers when choosing a method. “All” in the RMSE table refers to all missing values in the target series. No RMSE is reported for “all” for methods such as OLS and residual interpolation which require the neighbor also be non-missing. A separate column for that case provides apples-to-apples comparison for times with supporting neighbor data. DFM is nearly as good as resdidual interpolation for cases where the neighbor is present and can survive periods when both sources of data are missing which is 10% of the data!! Timing data is output, which shows the main downside of DFM and that is the fitting time. Reapplication of DFM on a larger/later time set with pre-fit parameters on a few years is much faster and that workflow is the focus of the next section.
In this particular comparison DFM comes out on top not only on coverage but on accuracy. This is NOT a generalizable result – as the period and length of gap are varied the RMSE estimates between methods will change by an amount that is greater than the difference between DFM and residual interpolation and. The latter are often a smidge more accurate. The main point is that they are about the same, so it is really about time versus coverage.
[ ]:
import time
def _avail_mask(obj):
return (obj.notna().any(axis=1) if isinstance(obj, pd.DataFrame) else obj.notna())
def rmse_by_mask(y_true, y_pred, mask):
common = y_true.index.intersection(y_pred.index)
if len(common) == 0:
return np.nan
m = mask.reindex(common).fillna(False)
if not m.any():
return np.nan
resid = (y_true.reindex(common) - y_pred.reindex(common)).to_numpy()
return float(np.sqrt(np.nanmean((resid[m.to_numpy()])**2)))
def _is_neighbor_required(method):
# Add here any method that requires neighbor to be present for prediction
return method in ['ols', 'huber', 'loess2d', 'resid_interp_linear', 'resid_interp_pchip', 'rolling_regression', 'lagged_elasticnet']
def _mask_exclude_leading_trailing(mask):
# Only keep True inside the first and last True in the mask (i.e., exclude leading/trailing gaps)
idx = np.flatnonzero(mask)
if len(idx) == 0:
return mask
mask2 = pd.Series(False, index=mask.index)
mask2.iloc[idx[0]:idx[-1]+1] = mask.iloc[idx[0]:idx[-1]+1]
return mask2
methods_for_table = ["substitute", "ols", "resid_interp_linear", "resid_interp_pchip", "dfm_trimbur_rw"]
fits = {}
for m in methods_for_table:
print(f"Fitting method: {m} ...", end=" ", flush=True)
t0 = time.time()
fits[m] = fill_from_neighbor(y2_gap, x2_gap, method=m)
t1 = time.time()
print(f"done in {t1 - t0:.2f} s")
gap_mask = y2_gap.isna()
nbr_mask = _avail_mask(x2_gap)
rows = []
for m, r in fits.items():
yhat = r['yhat']
# For methods that require neighbor, mask out where neighbor is missing (except leading/trailing)
if _is_neighbor_required(m):
valid_mask = nbr_mask
gap_mask_valid = gap_mask & nbr_mask
# Exclude leading/trailing gaps from this restriction
gap_mask_valid = _mask_exclude_leading_trailing(gap_mask_valid)
all_mask_valid = valid_mask
all_mask_valid = _mask_exclude_leading_trailing(all_mask_valid)
# If there are any False in all_mask_valid (i.e., neighbor missing inside), set RMSE to nan
if not all_mask_valid.all():
RMSE_all = np.nan
else:
RMSE_all = rmse_by_mask(y, yhat, mask=pd.Series(True, index=y.index))
# For "in gaps", do not output for neighbor-required methods
RMSE_in_gaps = np.nan
RMSE_gaps_with_neighbor = rmse_by_mask(y, yhat, mask=(gap_mask & nbr_mask))
else:
RMSE_all = rmse_by_mask(y, yhat, mask=pd.Series(True, index=y.index))
RMSE_in_gaps = rmse_by_mask(y, yhat, mask=gap_mask)
RMSE_gaps_with_neighbor = rmse_by_mask(y, yhat, mask=(gap_mask & nbr_mask))
rows.append({
"method": m,
"RMSE_all": RMSE_all,
"RMSE_all_with_neighbor": rmse_by_mask(y, yhat, mask=nbr_mask),
"RMSE_in_gaps": RMSE_in_gaps,
"RMSE_gaps_with_neighbor": RMSE_gaps_with_neighbor,
})
table = pd.DataFrame(rows).set_index("method").sort_index()
table
Fitting method: substitute ... done in 0.02 s
Fitting method: ols ... done in 0.08 s
Fitting method: resid_interp_linear ... done in 0.11 s
Fitting method: resid_interp_pchip ... done in 0.15 s
Fitting method: dfm_trimbur_rw ... Z(y): [1. 0. 1.] Z(x): [1.0403 0. 0. ]
diag(T): [1. 1. 1.]
diag(Q): [0.00e+00 0.00e+00 1.09e-06] diag(H): [1.e-05 1.e-05]
modes: factor=trimbur anom_mode=rw anom_var=target
active params: ['log_q_beta', 'log_q_ay', 'log_r_y', 'log_r_x', 'load']
done in 74.68 s
| RMSE_all | RMSE_all_with_neighbor | RMSE_in_gaps | RMSE_gaps_with_neighbor | |
|---|---|---|---|---|
| method | ||||
| dfm_trimbur_rw | 57.127105 | 55.100072 | 96.504941 | 93.092671 |
| ols | NaN | 549.685366 | NaN | 507.951475 |
| resid_interp_linear | NaN | 55.535812 | NaN | 94.703307 |
| resid_interp_pchip | NaN | 65.007505 | NaN | 110.855058 |
| substitute | 320.128587 | 325.340769 | 554.792402 | 554.792402 |
9. Storing & reusing DFM fits¶
You can save fitted DFM parameters and reload them to avoid re-estimation (useful for reproducible operations). The exact helper names may vary by version; the example below shows a common pattern.
[ ]:
import time
from vtools.functions.neighbor_fill import (
fill_from_neighbor,
dfm_pack_params, save_dfm_params, load_dfm_params,
)
# --- 1. Fit once (expensive) -----------------------------------------------
t0 = time.perf_counter()
res_fit = fill_from_neighbor(
y2_gap, x2_gap,
method="dfm_trimbur_rw"
)
mi = res_fit["model_info"]
print("has fitted_params?", "fitted_params" in mi, type(mi.get("fitted_params")))
blob = mi.get("fitted_params")
assert isinstance(blob, dict) and "param_names" in blob and "transformed" in blob, "No fitted params!"
t1 = time.perf_counter()
fit_time = t1 - t0
print(f"DFM fit completed in {fit_time:.2f} seconds")
blob = dfm_pack_params(res_fit["model_info"])
# --- 2. Save parameters (YAML) --------------------------------------------
save_dfm_params(blob, "dfm_trimbur_rw_vns_msd.yaml")
print("Parameters saved to dfm_trimbur_rw_vns_msd.yaml")
# --- 3. Load and reuse (cheap) --------------------------------------------
t2 = time.perf_counter()
blob2 = load_dfm_params("dfm_trimbur_rw_vns_msd.yaml")
res_reuse = fill_from_neighbor(
y2_gap, x2_gap,
method="dfm_trimbur_rw",
params=blob2 # skip fitting, just run the smoother
)
t3 = time.perf_counter()
reuse_time = t3 - t2
print(f"DFM reuse completed in {reuse_time:.3f} seconds")
# --- 4. Compare timings ----------------------------------------------------
print(f"\nSpeed-up from parameter reuse: {fit_time / reuse_time:,.1f}× faster")
Z(y): [1. 0. 1.] Z(x): [1.0403 0. 0. ]
diag(T): [1. 1. 1.]
diag(Q): [0.00e+00 0.00e+00 1.09e-06] diag(H): [1.e-05 1.e-05]
modes: factor=trimbur anom_mode=rw anom_var=target
active params: ['log_q_beta', 'log_q_ay', 'log_r_y', 'log_r_x', 'load']
has fitted_params? True <class 'dict'>
DFM fit completed in 76.14 seconds
Parameters saved to dfm_trimbur_rw_vns_msd.yaml
Z(y): [1. 0. 1.] Z(x): [1.0403 0. 0. ]
diag(T): [1. 1. 1.]
diag(Q): [0.00e+00 0.00e+00 1.09e-06] diag(H): [1.e-05 1.e-05]
modes: factor=trimbur anom_mode=rw anom_var=target
active params: ['log_q_beta', 'log_q_ay', 'log_r_y', 'log_r_x', 'load']
DFM reuse completed in 8.838 seconds
Speed-up from parameter reuse: 8.6× faster
10. Appendix — API summary¶
fill_from_neighbor(
target, # pd.Series
neighbor, # pd.Series | pd.DataFrame
method: str, # 'substitute' | 'ols' | 'huber' | 'loess2d' | 'resid_interp_linear' | 'resid_interp_pchip' |
# 'rolling_regression' | 'lagged_elasticnet' | 'state_space' | 'dfm_trimbur_ar' | 'dfm_trimbur_rw'
lags=None, # Iterable[int] for lagged methods (e.g., range(0,5))
bounds=(None, None), # optional min/max clipping after prediction
window=None, # for rolling regression
**kwargs # method-specific args (e.g., params=... for DFM reuse)
) -> dict # with keys: filled, yhat, (pi_lower, pi_upper), model_info, metrics
API CONTRACT (neighbor_fill.fill_from_neighbor)
Signature
---------
fill_from_neighbor(
target: pd.Series,
neighbor: Union[pd.Series, pd.DataFrame],
method: str = "substitute",
regime: Optional[pd.Series] = None,
bounds: Tuple[Optional[float], Optional[float]] = (None, None),
*,
params: Optional[dict] = None,
**kwargs,
) -> Dict[str, Any]
Inputs
------
- target: Regular-grid pandas Series (DatetimeIndex), may contain NaNs (gaps).
- neighbor: Series or DataFrame on the *same* grid (same step & phase) as target.
- method: One of
{'substitute','ols','huber','rolling','lagged_reg','loess',
'dfm_trimbur_rw','dfm_trimbur_ar','resid_interp_linear','resid_interp_pchip'}
- regime (optional): Categorical Series aligned to target for per-regime fitting.
- bounds: (lo, hi) applied as a final clip to yhat.
- params: Packed fitted params for reuse (currently used by DFM backends).
- **kwargs: Method-specific options (see below).
Grid requirement
----------------
No internal resampling is performed. target and neighbor **must** be equally spaced
with identical step and phase. Regularize upstream as needed.
Method-specific **kwargs**
--------------------------
Common
- lags: int | Sequence[int], optional
- seed: int, optional
'ols'
- lags: int | Sequence[int], optional
- add_const / fit_intercept: bool (default True)
'huber'
- lags: int | Sequence[int], optional
- huber_t: float (default 1.35), maxiter: int (200), tol: float (1e-6)
'rolling'
- window: int (REQUIRED; samples, not time offset)
- min_periods: int (default=window)
- center: bool (default False)
- lags: int | Sequence[int], optional
'lagged_reg'
- lags: int | Sequence[int] (recommended)
- alpha: float (L2), l1_ratio: float (ENet), standardize: bool=True
'loess'
- frac: float (default 0.25), it: int (default 0), degree: int (default 1)
'dfm_trimbur_rw' / 'dfm_trimbur_ar'
- rx_scale: float (default 1.0)
- maxiter: int (default 80), disp: int (default 0)
- anom_var: {'target','neighbor'} (variant default; may override)
- ar_order: int (AR anomaly order; usually 1 for *_ar)
- param_names: list[str], optional
- params: (top-level) packed params blob to skip refitting
'resid_interp_linear' / 'resid_interp_pchip'
- min_overlap: int (default 3)
- clip_residuals_sigma: float, optional
- enforce_monotone: bool (PCHIP only; default False)
Returns
-------
dict with keys:
- yhat: pd.Series # filled target on target.index
- pi_lower, pi_upper: pd.Series | None # uncertainty bands if available
- model_info: dict # diagnostics, see below
model_info (typical fields)
---------------------------
- method: str
- scaling: {'y_mu','y_sd','x_mu','x_sd'}
- param_names: list[str] (if applicable)
- fitted_params: dict # portable blob for reuse (DFM)
- llf, aic, bic: float (if applicable)
- regime_info: dict[...] # present when regime is provided